



GNSS, você acabou de colocar suas 2 mãos em um artigo definitivo sobre o tema. Com a leitura do mesmo você descobrirá:
- Quais os 2 grupos de métodos de posicionamento existentes;
- Quais os 11 métodos de posicionamento pelo GNSS existentes;
- Como os dados são rastreados pelo receptor;
- Quais os 4 tipos de receptores existentes;
- O que é o ajustamento de dados;
- E muito mais.
Prossiga a leitura com máxima atenção.
GNSS – Os 2 tipos de posicionamento existentes


Dê uma espiada no mapa mental abaixo:
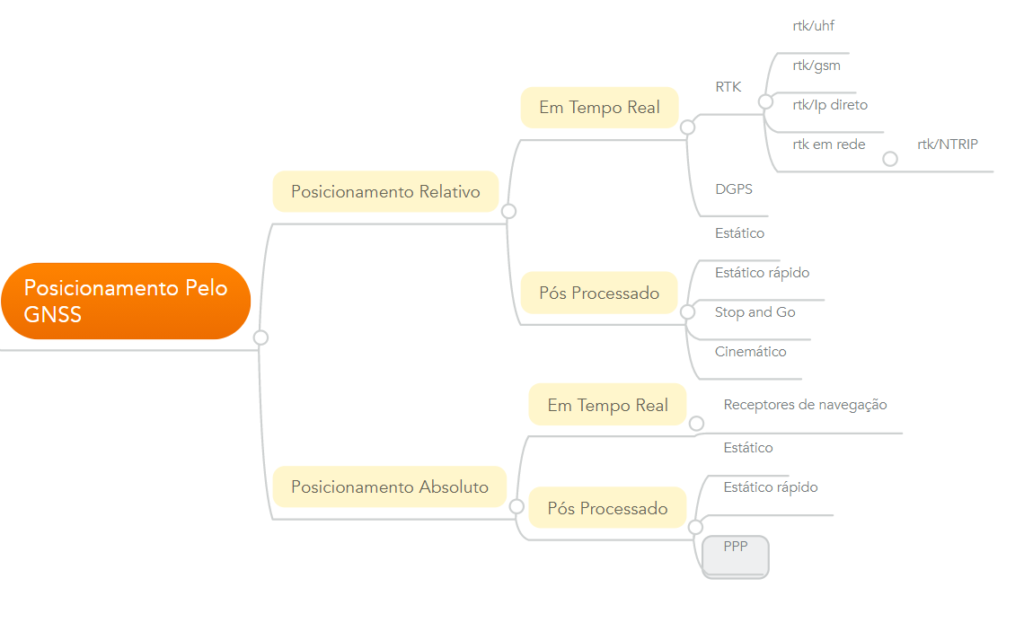

Perceba que o posicionamento pelo GNSS se divide em 2 grandes grupos de métodos de posicionamento:
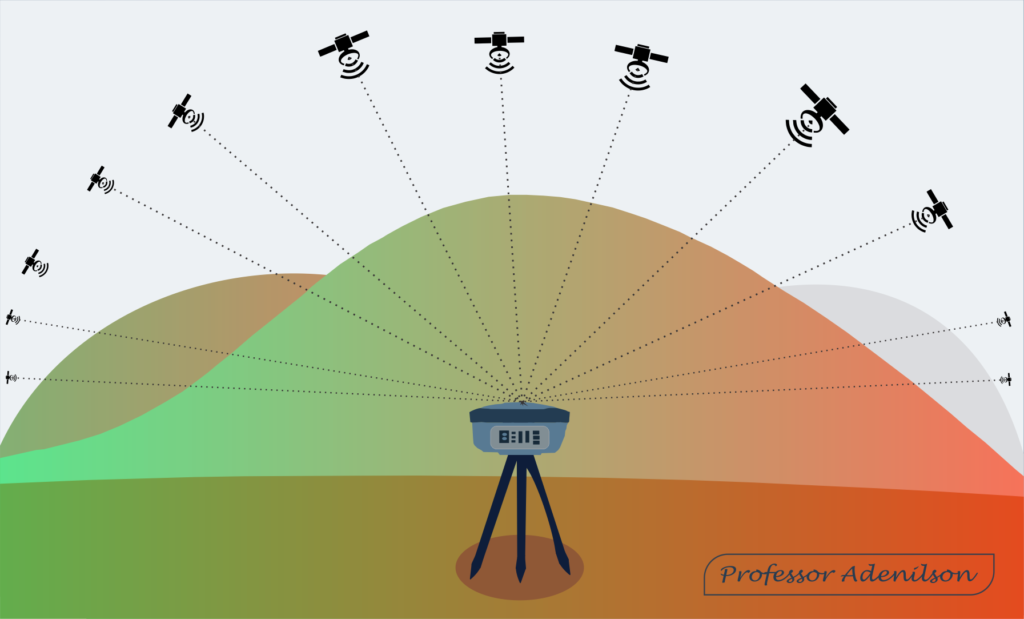
O posicionamento absoluto caracteriza-se pela utilização de um único receptor. Seja o mesmo um receptor geodésico.

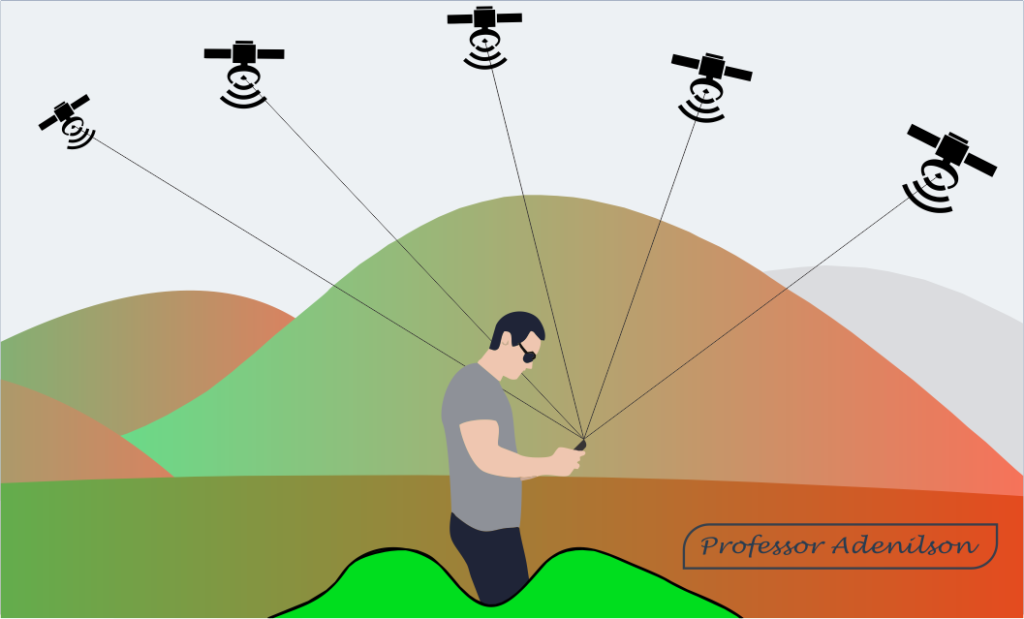
Ou um receptor de navegação.
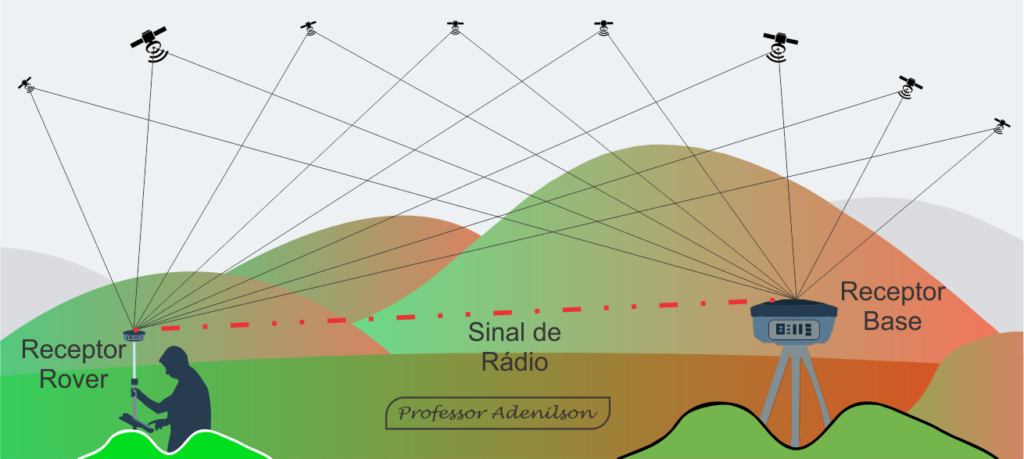
Por outro lado, o posicionamento relativo, caracteriza-se pela utilização de 2 ou mais receptores, onde que um receptor fica estacionado em um local de coordenadas conhecidas, enquanto que o profissional utiliza o outro receptor para rastrear novas posições.
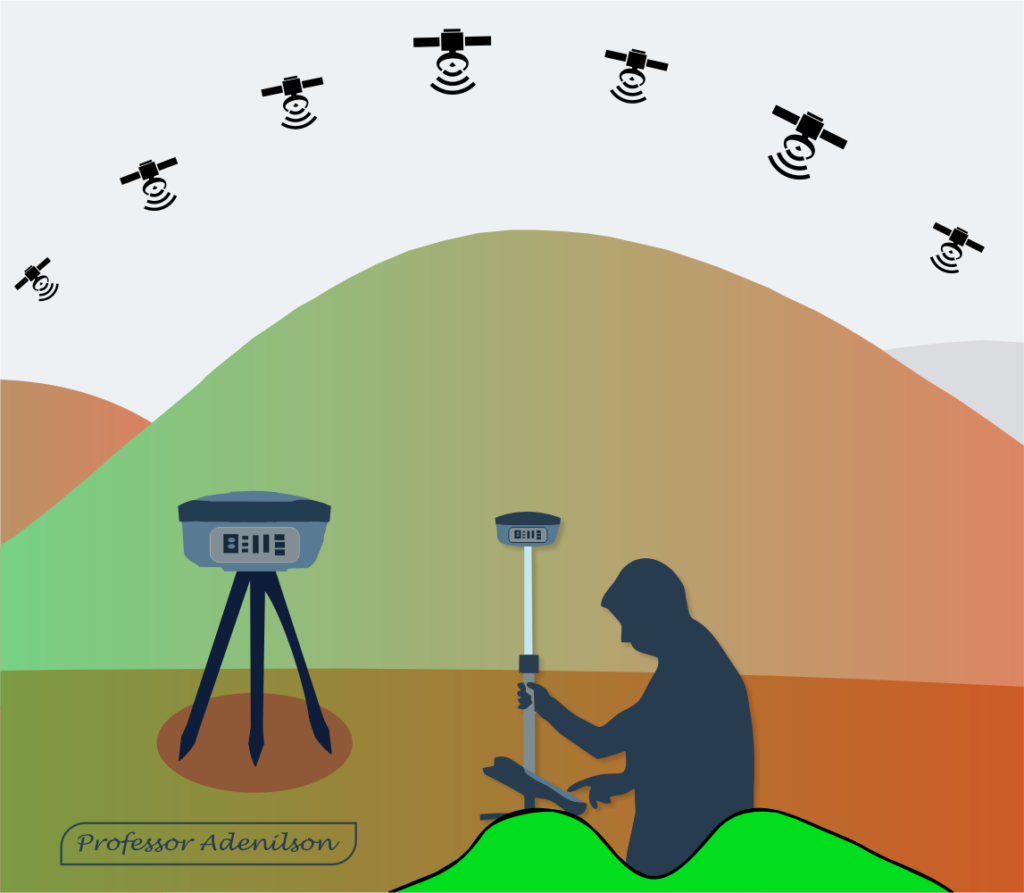

A grande vantagem da utilização do método relativo está no fato que utiliza-se o receptor de base para corrigir a fase da onda portadora, propagando-se esta correção para o receptor rover.
Posicionamento Pelo GNSS – Domine a utilização dos diferentes métodos de posicionamento

Caso deseje aprender mais a respeito de algum método de posicionamento pelo GNSS especifico, é só acessar o respectivo link na lista abaixo.
- Método DGPS;
- Os 4 tipos de posicionamento pelo método RTK existentes;
- Método NTRIP;
- GPS de Navegação;
- Posicionamento relativo estático rápido;
- Posicionamento cinemático;
- Posicionamento semi cinemático;
- Posicionamento por Ponto Preciso (PPP).
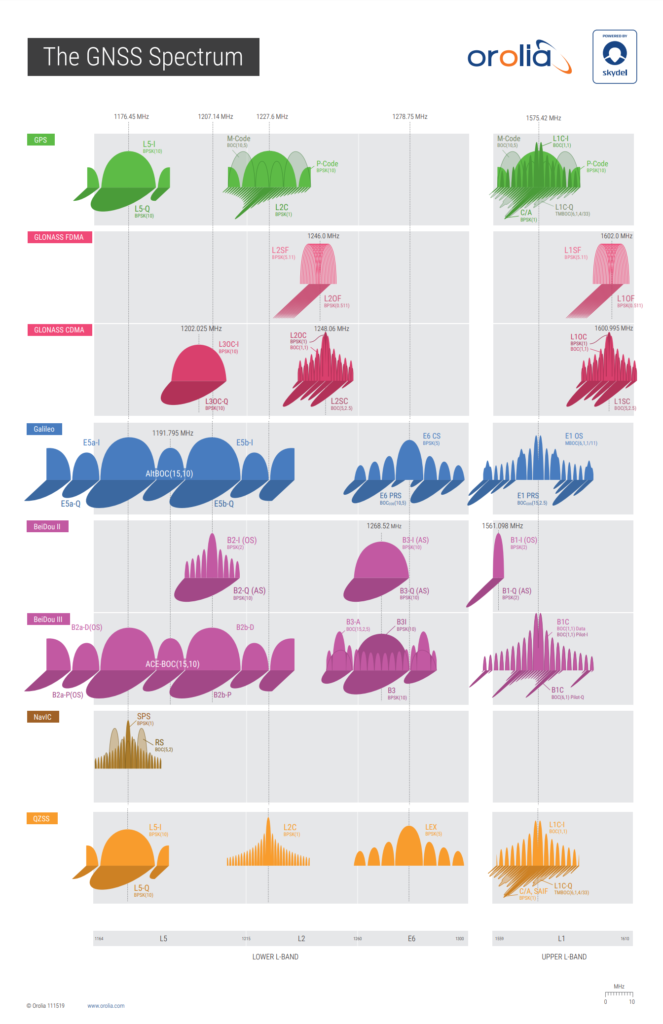
Classificação dos receptores GNSS quanto ao comprimento de onda

Na imagem abaixo você pode ver as diferentes frequências utilizadas pelas constelações GNSS.
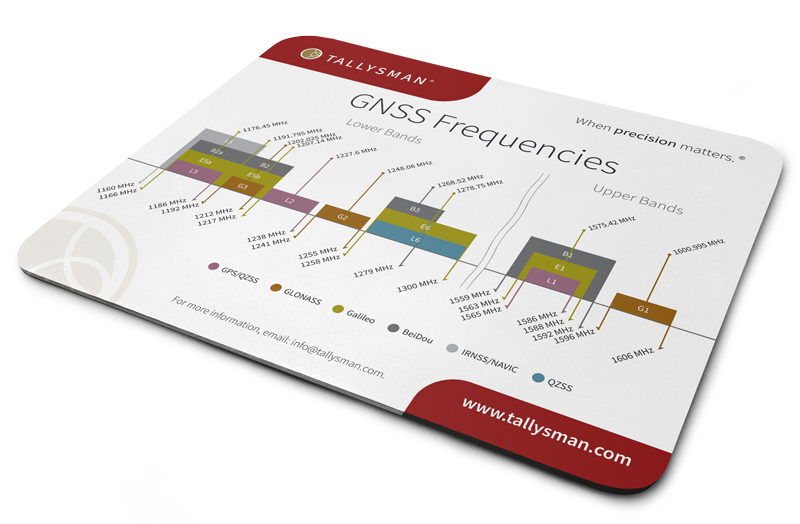

Perceba que existe sobreposição entre os comprimentos de onda utilizados pelas diferentes constelações.
Para que isso seja possível as constelações GNSS utilizam diferentes polarizações.

Exemplo de utilização dos diferentes comprimentos de onda
Vou simplificar as coisas para você utilizando um exemplo no qual irei lhe mostrar por que é necessário a existência de diferentes comprimentos de onda.
Para isso vou utilizar como base um receptor mais antigo, que rastreia dados da constelação GPS.
Ex: João é Topógrafo e precisa fazer o levantamento do perímetro de uma propriedade para um processo de Georreferenciamento de Imóveis Rurais.
Neste levantamento o mesmo irá levantar inclusive dados de alguns vértices que estão dentro de uma mata densa. A mesma é uma mata atlântica com uma altura média de 15 metros.
A pergunta que fica é:
Qual tipo de receptor é mais indicado para que o João efetue a obtenção de dados e qual método de obtenção de dados ele deve utilizar?
Vamos analisar a situação e os diferentes tipos de comprimentos de onda existentes, vendo qual é o mais indicado para nosso amigo João. Lembrando que existe uma acurácia determinada pela legislação a qual o mesmo deve obedecer.
No nosso caso, vamos dizer que a acurácia exigida pela legislação é a exigida para os marcos do perímetro (tipo M) em processos de georreferenciamento de imóveis Rurais, 50 CM.
PS: Irei mostrar o exemplo e conforme abrir o mesmo, informarei as diferentes acurácias exigidas pela legislação e os diferentes métodos de posicionamento pelo GNSS.
1° tipo de receptor GNSS – Receptor de navegação

Dentre os diferentes tipos de comprimentos de onda existentes, a primeira opção do nosso amigo é utilizar um receptor de navegação. Vamos analisar as características deste sinal e ver se o João pode utilizar este receptor.
Os receptores de navegação possuem um comprimento de onda de aproximadamente 300 metros (código c/a, E1 e B1).
Um comprimento de ondas deste tamanho apresenta grandes vantagens na obtenção de dados em locais de mata fechada, pois o mesmo contorna facilmente a vegetação.
O problema é que a acurácia possibilitada por este comprimento de onda está na casa dos 3 metros.
Lembre-se que nosso amigo João precisa de uma acurácia melhor do que 50 cm, logo receptores de navegação, como é o caso dos receptores Garmin, não são apropriados para a realização de trabalhos topográficos, sendo que nosso amigo João não poderá utilizar este tipo de receptor.
A acurácia dos receptores de navegação torna estes equipamentos ótimos para a realização de outros trabalhos como, por exemplo, para levantamentos de áreas úteis de lavouras, levantamentos de dados para processos de licenciamento ambiental e roteirização que são trabalhos que não necessitam de grande acurácia.
Trabalhos mais acurados não podem ser realizados com esse tipo de receptor.
Como exemplos de trabalhos que não podem ser realizados com receptores de navegação temos: locação de marcos geodésicos, topografia de estradas, topografia de minas, topografia de obras, topografia cadastral etc.
2° tipo – Receptores Cadastrais
Outro tipo de receptor existente são os receptores utilizados em SIG e em cadastro técnico multifinalitário.
Na realidade, estes receptores também utilizam códigos de navegação.
Os mesmos possuem algumas aplicações extras como, por exemplo, um banco de dados utilizado para cadastro de informações de interesse e, em alguns casos, uma câmera fotográfica que possibilita a obtenção de fotos com as coordenadas do ponto.
Perceba que nosso amigo João também não poderá utilizar esse tipo de receptor, pois a acurácia é a mesma, algo no entorno de 2,5 a 3 M.
3° tipo de receptor GNSS – Receptores L1
Nosso amigo João poderá utilizar receptores código L1. Estes receptores possuem comprimento de onda de 24 cm o que possibilita a obtenção de uma acurácia melhor do que 50 cm.
Perceba que são receptores que podem ser utilizados para o Georreferenciamento de Imóveis Rurais, logo, o nosso amigo encontrou o primeiro tipo de receptor que pode utilizar.
Receptores L1 podem ser utilizados para a obtenção dos diferentes dados necessários em processos de Georreferenciamento como:
- Marcos de apoio básico cuja acurácia deve ser melhor do que 10 cm;
- Marcos de apoio imediato cuja acurácia deve ser melhor do que 20 cm;
- Marcos definidores de mudanças de ângulo no perímetro cuja acurácia deve ser melhor do que 50 cm;
- Pontos do tipo P cuja acurácia deve ser melhor do que 3 metro;
- Pontos do tipo O cuja acurácia deve ser melhor do que 7 metros.
Receptores código L1 normalmente possuem 2 problemas:
O primeiro é que o comprimento de onda por ser de apenas 19 cm encontra dificuldades para atravessar matas fechadas. Com isso, nosso amigo João pode ter sérios problemas para efetuar a obtenção de dados em locais de mata fechada.
O segundo problema deste tipo de receptor é que não possibilita a utilização do método RTK e devido a isso, deixam a desejar no quesito velocidade de obtenção de dados.
O certo é que nosso amigo encontrará certas dificuldades para obter os dados e talvez tenha até que abrir uma picada no entorno de alguns vértices.
4° tipo de receptor GNSS – Receptores L1/L2

O quarto tipo de receptor existente são os receptores que utilizam vários comprimentos de onda.
Este tipo de receptor também conhecido como receptor Geodésico, possibilita uma maior velocidade de obtenção de dados.
Outra grande vantagem é que por utilizar diferentes comprimentos de onda, os receptores geodésicos possibilitam a obtenção de dados em locais de mata fechada.
Perceba que este tipo de receptor é o mais indicado para o nosso amigo.
Isso porque o mesmo além de possibilitar a obtenção de dados com uma acurácia dentro do que a legislação exige.
O mesmo também possibilita uma maior velocidade de trabalho.
MÉTODOS DE POSICIONAMENTO PELO GNSS

Agora que entendemos quais os diferentes tipos de receptores GNSS e os correspondentes comprimentos de onda utilizados pelos mesmos, vamos entender quais métodos de obtenção de dados são os mais indicados para nosso amigo João utilizar nas mais variadas situações.
A primeira coisa que você precisa entender é que quanto mais tempo o receptor ficar obtendo dados, maior tende a ser a acurácia obtida. Isso porque o mesmo armazenará mais observações, de um maior número de satélites.
Na realidade, eu não irei mostrar todos os métodos de posicionamento pelo GNSS, mas sim, apenas os que possibilitam uma maior velocidade de trabalho.
Afinal maior velocidade de trabalho significa mais dinheiro no bolso não é mesmo?
GNSS- Método estático


Este é o primeiro dos métodos de posicionamento pelo GNSS indicados para serem utilizados no Georreferenciamento de Imóveis Rurais.
Neste método, nosso amigo João deve ligar o receptor e deixar o mesmo parado sobre o ponto, rastreando os dados dos satélites por pelo menos 20 minutos.
Perceba que o mesmo é um método demorado, porém este normalmente é o método de posicionamento pelo GNSS que possibilita a obtenção de dados com melhor acurácia.
Na realidade, se olharmos para as acurácias exigidas pela legislação para os diferentes tipos de dados, perceberemos que existem métodos mais rápidos do que o estático, porém os mesmos não conseguem chegar a acurácias melhores do que 20 cm.
Desta maneira, iremos utilizar o Método Estático somente no rastreamento de marcos de apoio básico e marcos de apoio imediato.
Relembrando que a acurácia exigida pela legislação é de 10 cm para marcos de apoio básico e de 20 cm para marcos de apoio imediato.
Então, como nosso amigo João não irá utilizar estações totais, somente um par de receptores GNSS, o mesmo precisa locar apenas o marco de apoio básico para o qual deve utilizar o método estático.
Lembre-se que conforme falei anteriormente, quanto mais tempo nosso amigo deixar o GPS rastreando dados, melhor será a acurácia obtida.
Algo de praxe no rastreamento de dados em marcos de apoio básico é deixar-se o receptor rastreando dados por pelo menos 4 horas.
Por causa disso, normalmente divide-se os trabalhos em 2 dias, sendo que no primeiro dia loca-se o marco de apoio básico, instala-se o receptor sobre o mesmo e enquanto este rastreia os dados, percorre-se o perímetro, locando-se os marcos nos vértices do mesmo.
Posicionamento pelo GNSS – Método RTK

Este é o segundo tipo de método de posicionamento pelo GNSS normalmente utilizado.
Devido as características do mesmo, ele não é indicado para marcos de apoio básico e marcos de apoio imediato.
Por outro lado, a grande vantagem deste tipo de receptor é que o mesmo possibilita a obtenção de dados com uma grande velocidade. E o melhor, com uma acurácia melhor do que 50 cm que é a acurácia exigida para os marcos do tipo M.
Este tempo normalmente é menor do que 1 minuto. Com isso, este é o método de posicionamento pelo GNSS mais indicado para nosso amigo João utilizar na obtenção de dados do perímetro.
O mesmo pode utilizar este método tanto para pontos do tipo M, como para pontos do tipo do tipo P e V.
Perceba que analisando as acurácias e o tempo de obtenção de dados encontramos os métodos de posicionamento mais indicados para nosso amigo João utilizar.
São eles: Método Estático nos pontos de apoio básico e imediato e método RTK nos pontos do perímetro (tipos M, P e V).
Método Relativo Estático Rápido


Embora tenhamos encontrado os métodos mais indicados para serem utilizados por nosso amigo, o método RTK utiliza o sinal de rádio na comunicação entre a base e o rover.
O problema é que se existir um cerro entre a base e o rover, o sinal de rádio não vai chegar até o rover, inviabilizando a utilização do método RTK.
Nestes casos, você precisa utilizar o método relativo estático rápido, no qual deve-se ficar com o receptor rastreando os dados dos satélites por pelo menos 2 minutos.
Outra observação importante é que receptores L1 e, inclusive alguns receptores L1/L2, não possuem o método RTK. Nestes casos, você deve utilizar o método relativo estático rápido em todos os pontos do perímetro (tipos M, P e V).
COMO OS DADOS SÃO RASTREADOS PELO RECEPTOR
Você deve ter percebido que por diversas vezes, eu falei em deixar o receptor rastreando dados por no mínimo determinado intervalo de tempo. Isso se deve a maneira como os mesmos obtém os dados.
Basicamente, deixar os receptor rastreando dados nada mais é do que ativar o rastreamento e armazenamento de dados no cartão de memória.
Processo que normalmente envolve apertar 2 botões, o primeiro para ligar o receptor e o segundo para rastrear os dados.
Feito isso, é só deixar o mesmo rastreando dados pelo tempo estipulado.
Por exemplo, no mínimo 2 minutos para o método relativo estático rápido e 20 minutos para o método estático.
Na realidade, o receptor não armazena os dados da posição do satélite de maneira constante. Normalmente, configura-se o mesmo para que rasteie dados de tanto em tanto tempo. Para isso se dá o nome de época.
Por exemplo: os receptores normalmente são configurados para rastrear algo no entorno de 3 a 5 épocas por segundo. Isso significa que os mesmos irão armazenar 3 dados referentes a cada satélite a cada segundo.
Ou seja, se você deixar o receptor rastreando dados a uma velocidade de 3 épocas por segundo e rastrear dados por 2 minutos, no final terá armazenado 360 observações.
Lembre-se que no início do artigo eu falei a respeito de acurácia e precisão.
Perceba que conforme o receptor vai armazenando observações, algumas destas observações estarão mais acuradas, já outras não estarão tão acuradas.
Se você plotar estas observações em uma imagem, perceberá que terá um comportamento muito parecido com os da imagem acurácia mostrada anteriormente.
Posicionamento pelo GNSS – Ajustamento de Dados
As diferentes observações obtidas durante o rastreamento de dados de um ponto terão diferentes distancias em relação ao objetivo que é a exatidão.
Acontece que na utilização dos métodos, estático e relativo estático rápido, as coisas não se resumem em simplesmente utilizar o ponto mais acurado e desprezar os demais.
O que se faz é um tratamento estatístico dos dados, levando-se em consideração as diferentes observações.
Imagine que é feito algo parecido com uma média dos pontos, porém, que não é uma média e sim um ajustamento, onde que se leva em consideração as variâncias e covariâncias dos dados.
Por causa disso, nos métodos estático e relativo estático rápido é necessário fazer-se o ajustamento dos dados.
Na realidade, se faz também um tratamento destes dados aonde uma série de erros são corrigidos.
Para isso utiliza-se as efemérides, que simplificando, nada mais são do que arquivos que relatam diferentes erros.
Existem 3 tipos de efemérides: Precisas, rápidas e transmitidas, onde que normalmente utiliza-se as efemérides precisas ou as efemérides rápidas.
O método RTK, diferentemente dos métodos estático e relativo estático rápido, possibilita a obtenção dos dados em tempo real.
Ou seja, no mesmo não é necessário fazer-se o ajustamento de dados obtidos, mas sim, apenas a correção dos vetores formados entre o ponto rastreado e a base.
No vídeo abaixo eu passo mais algumas dicas geniais a respeito do assunto.

É isso por este artigo. Gratidão por você ter lido o mesmo. 🙏
Domine a Topografia Cadastral através de um livro formado por centenas de exemplos práticos

Você quer dominar a Topografia Cadastral?
Então eu tenho uma ótima noticia para você. Me refiro ao livro Topografia Cadastral e Georreferenciamento de Imóveis Rurais na Prática.
O mesmo é dividido em 10 capítulos recheados com muitos estudos de caso e exemplos práticos. Dê uma espiadinha no sumário do mesmo:

Para conhecer melhor a estrutura do livro, juntar-se a mais de 800 profissionais e adquirir sua cópia é só clicar no botão abaixo: