



Quais os diferentes métodos de posicionamento absoluto existentes. Esta é uma dúvida comum entre profissionais iniciantes e até mesmo entre profissionais experimentados.
Outro dia mesmo, conversando com um profissional que trabalha com topografia a mais de 20 anos, percebi que o mesmo poderia aumentar sua produtividade se conhecesse melhor o aplicativo de coleta de dados que utiliza.
Infelizmente este é um erro que muitos profissionais cometem, não conhecem bem os métodos de posicionamento e o aplicativo de coleta de dados e acabam tendo uma produtividade muito aquém do que poderiam ter.
Perceba como que adquirir um Curso de Operador de Receptores GNSS é um investimento que se paga.
Os 2 métodos de posicionamento pelo GNSS existentes

Caso você não saiba, o posicionamento pelo GNSS se divide em 2 grandes grupos de métodos de posicionamento. São eles:
- Posicionamento absoluto e;
- Posicionamento relativo.
Caso você deseje aprender a respeito do posicionamento relativo, aconselho que leia este artigo do blog. No mesmo, eu mostro os diferentes métodos de posicionamento relativo existentes, mostrando inclusive as vantagens e aplicações dos mesmos.
Neste outro artigo eu abordo a utilização do método NTRIP.
Veja no mapa mental abaixo um resumo com os diferentes métodos de posicionamento pelo GNSS existentes.
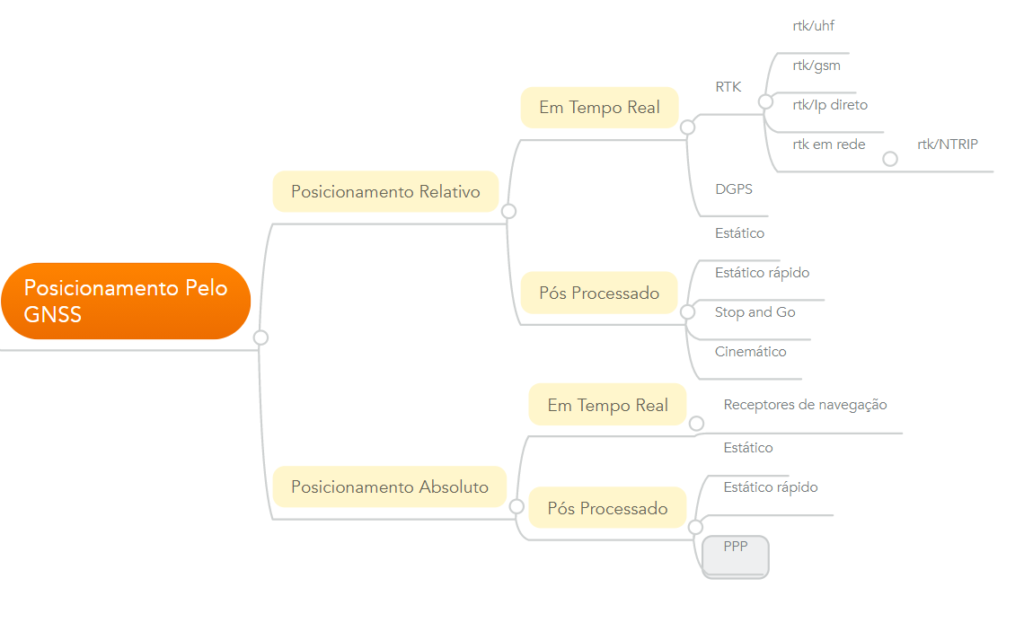

Perceba que o posicionamento relativo se divide em posicionamento em tempo real e posicionamento pós processado.
No caso dos métodos de posicionamento absoluto, com exceção dos receptores de navegação, todos os demais métodos de posicionamento são processados.
Métodos de posicionamento absoluto

Vamos conhecer os diferentes métodos de posicionamento absoluto existentes.
Posicionamento absoluto com receptores de navegação


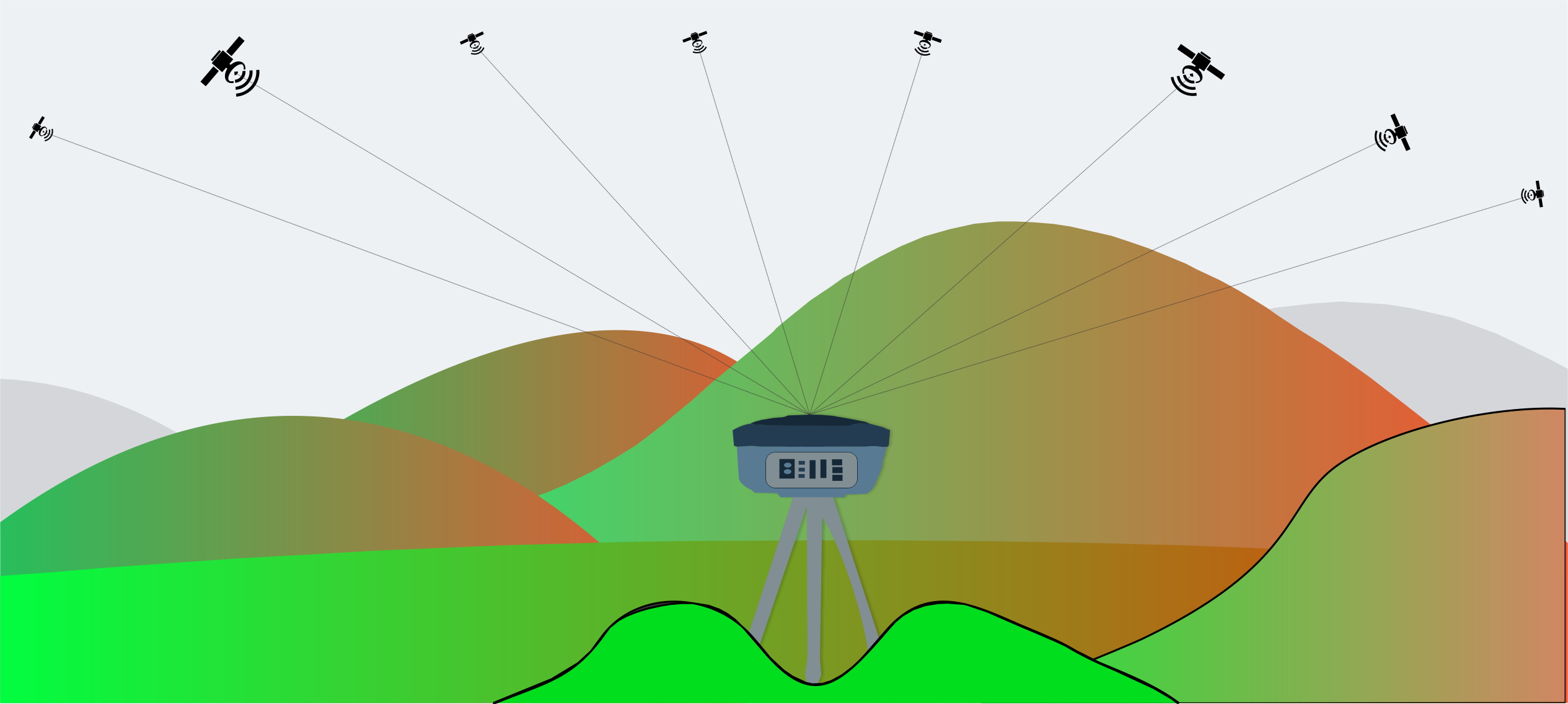
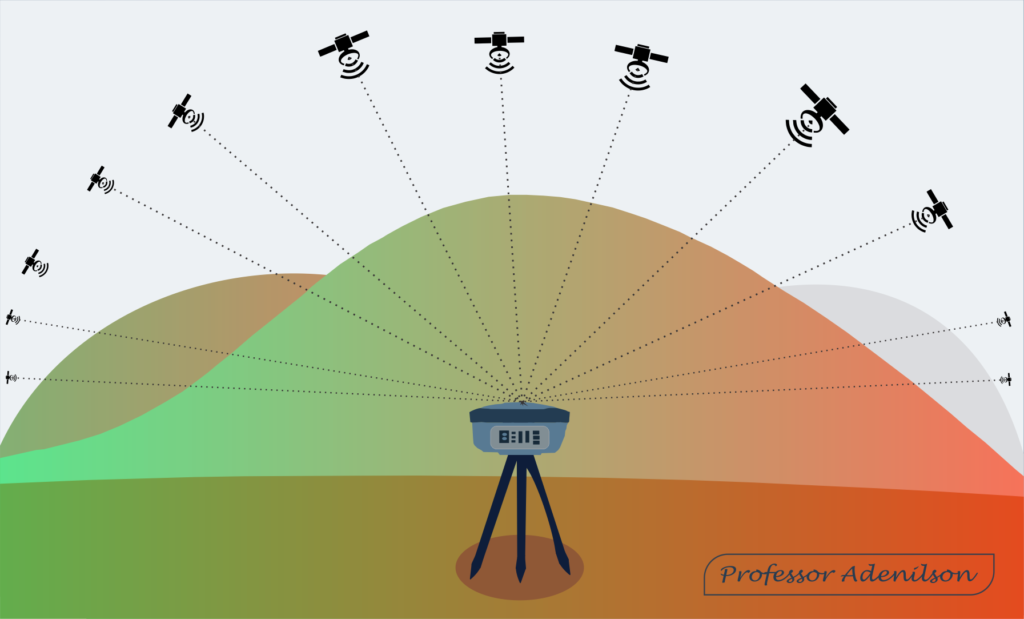
Olhe para a imagem abaixo.
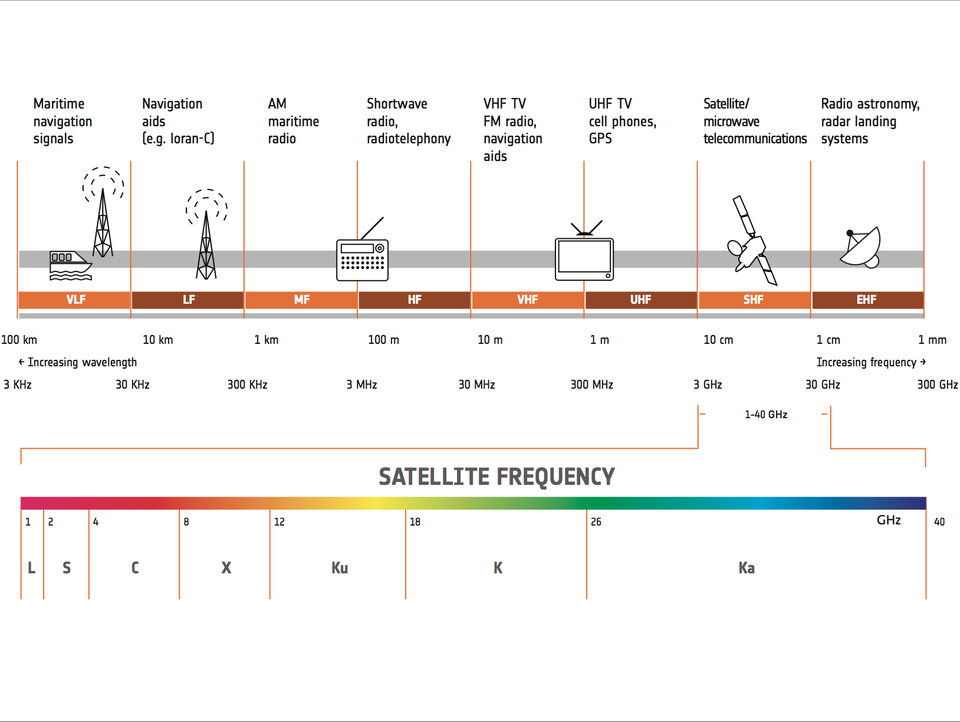

O sistema GPS utiliza uma série de ondas de rádio para fornecer informações que possibilitam que os usuários se localizem na superfície terrestre.
São elas:
- Código C/A;
- Banda P;
- Banda L.
Os receptores de navegação utilizam frequências de navegação o código C/A, que possui um comprimento de onda de aproximadamente 300 metros.
A grande vantagem do mesmo é que ele consegue contornar facilmente barreiras, possibilitando a determinação de uma posição até mesmo no interior de uma mata fechada.
Alias, o grande motivo de existência dos receptores de navegação é:
Possibilitar a determinação de coordenadas em tempo real de qualquer local da superfície topográfica!
Para possibilitar isso, a determinação de coordenadas geo-espacializadas em tempo real, os receptores de navegação utilizam:
- O código C/A, que possui um comprimento de onda de aproximadamente 300 M;
- A pseudo-distância;
- As efemérides transmitidas.
Devido a estas características, receptores de navegação cumprem seu objetivo, contornando a maioria dos obstáculos, conseguindo chegar em locais que os demais sinais não conseguem.
Com isso, possibilitam a determinação de coordenadas em tempo real em qualquer local da superfície topográfica.
Porém, para conseguir cumprir este objetivo, a acurácia dos dados obtidos com este tipo de receptor precisou ser sacrificada, sendo que a mesma costuma oscilar no entorno dos 2,5 aos 5 metros.
Logo, este tipo de receptor é muito bom, haja vista o objetivo do mesmo que é possibilitar o posicionamento em qualquer lugar da superfície terrestre em tempo real.
Porém, para que isso fosse possível, a acurácia precisou ser degradada.
Caso você deseje saber mais sobre a utilização de receptores de navegação, aconselho que leia este artigo. No mesmo eu mostro como utilizar receptores de navegação em processos de georreferenciamento.
Posicionamento absoluto estático

Este método de posicionamento pelo GNSS também é conhecido como Posicionamento por Ponto (PP), sendo que o mesmo necessita de apenas um receptor e de no mínimo 4 satélites visíveis simultaneamente.
Conforme o próprio nome diz, este método é estático. Ou seja, o receptor fica parado durante o rastreamento de dados.
O tempo que o receptor deve ficar parado, rastreando dados, deve ser de no mínimo 20 minutos, sendo que a aplicação para a qual o mesmo está sendo utilizado é que definirá o tempo de rastreio de dados.
Por exemplo, em processos de georreferenciamento, este método de posicionamento é utilizado para a locação de marcos de apoio básico e de marcos de apoio imediato, onde que deixa-se o receptor rastreando dados por pelo menos 4 horas.
Neste artigo, Perdigão e Santos analisaram a acurácia obtida a partir de diferentes tempos de rastreio.
Posicionamento absoluto estático rápido


O posicionamento absoluto estático rápido é uma variação do posicionamento absoluto, onde que o receptor fica rastreando dados por um período inferior a 20 minutos.
Este método é pouco utilizado, pois existem métodos de posicionamento pelo GNSS mais rápidos e que possibilitam uma maior acurácia.
Posicionamento por ponto preciso

O Posicionamento por Ponto Preciso (PPP), não é exatamente um método de posicionamento, mais sim um tratamento que os dados recebem, assim como o ajustamento de dados.
O mesmo é feito a partir do site do IBGE, a partir de dados levantados com a utilização do método absoluto estático e do método absoluto estático rápido.
O posicionamento por ponto preciso exige que o usuário forneça um arquivo de observação GNSS (o com final .o) nos formatos RINEX ou HATANAKA. Além disso, o IBGE PPP utiliza outros arquivos necessários para gerar os resultados, tais como:
- Órbitas e relógios (satélite);
- Correção do centro de fase das antenas dos satélites e dos receptores;
- Parâmetros de transformação ITRF/SIRGAS2000;
- Modelo de carga oceânica;
- Modelo de velocidades;
- Modelo de pressão, temperatura e umidade;
- Modelo de Ondulação Geoidal – MAPGEO2015, entre outros.
Vídeo a respeito do assunto.
É isso por este artigo. Gratidão por você ter lido o mesmo. 🙏
Domine a Topografia Cadastral através de um livro formado por centenas de exemplos práticos

Você quer dominar a Topografia Cadastral?
Então eu tenho uma ótima noticia para você. Me refiro ao livro Topografia Cadastral e Georreferenciamento de Imóveis Rurais na Prática.
O mesmo é dividido em 10 capítulos recheados com muitos estudos de caso e exemplos práticos. Dê uma espiadinha no sumário do mesmo:

Para conhecer melhor a estrutura do livro, juntar-se a mais de 800 profissionais e adquirir sua cópia é só clicar no botão abaixo: